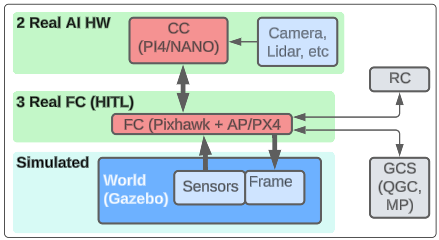
Part 3 HITL
In part 3 a real Pixhawk (AP/PX4) (below in red) is used. The rest of the copter components (frame, motors, IMU, GPS, motor control, etc) are all simulated.
HITL is described for PX4, Ardupilot, and Matlab.
PX4
xxxx
Ardupilot
xxxx
Matlab
Matlab is used to simulate the world (sensor inputs, flight dynamics, etc).